- 在安装之前,先要配置好Ubuntu的系统环境
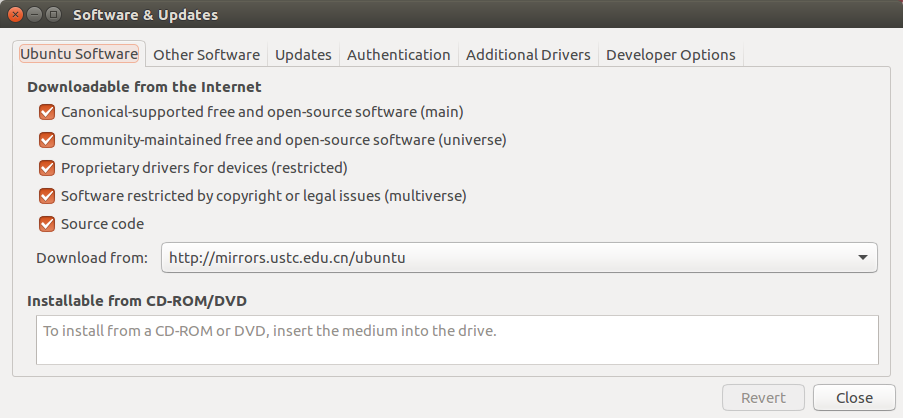
打开
System Settings -> Software & updates -> ubuntu software,全部都勾选,如图所示:
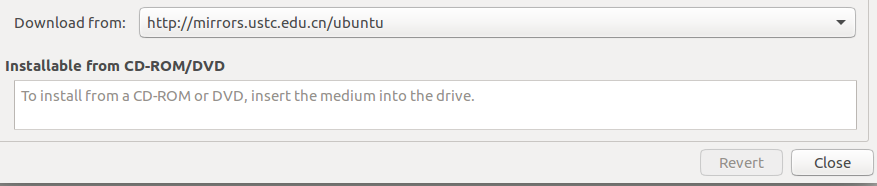
- 更改源为中国科学技术大学的镜像源 (使用国内的Ubuntu镜像源下载速度会更快些),如图所示:
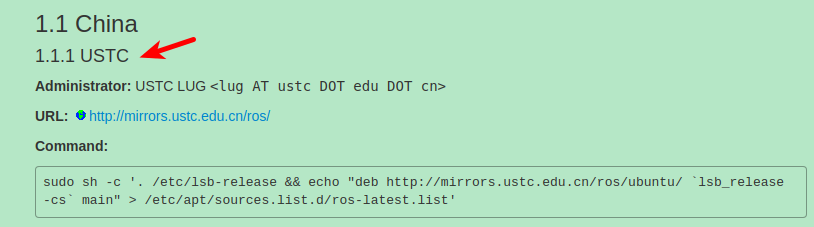
- 添加 sources.list(添加镜像源:科大源)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
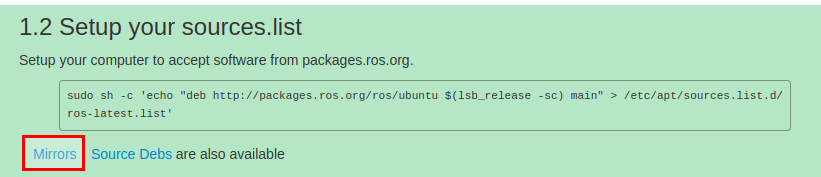
- ⑴. 点击下图红框中的链接,进入:
- ⑵. 粘贴下图的命令Command即可。
- 添加 Keys(公钥是Ubuntu的一种安全机制,也是ROS安装不可缺少的一步,第
1步勾选的目的就是这个)sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 执行系统更新,更新源列表, 确保获得的ROS软件是最新的
sudo apt update
sudo apt upgrade
- 安装ROS包
ROS中有很多函数库和工具,官网提供了四种默认的安装方式,当然也可以单独安装某个特定的软件包。这四种方式包括桌面完整版安装、桌面版安装,基础版安装、单独软件包安装。推荐安装桌面完整版安装(包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能),如下:
- 安装Kinetic版本的ROS(desktop-full : 桌面完整版)
sudo apt-get install ros-kinetic-desktop-full
如果你不想安装桌面完整版,你还可以尝试以下三种方式安装:
- 桌面版安装(包含ROS、rqt、rviz以及通用机器人函数库)
sudo apt-get install ros-kinetic-desktop
- 基础版安装(包含ROS核心软件包、构建工具以及通信相关的程序库,无GUI工具)
sudo apt-get install ros-kinetic-ros-base
- 单独软件包安装(这种安装方式在运行ROS缺少某些package依赖时会经常用到。你可以安装某个指定的ROS软件包,使用软件包名称替换掉下面的PACKAGE)
sudo apt-get install ros-kinetic-PACKAGE
例如系统提示找不到slam-gmapping,你就可以:sudo apt-get install ros-kinetic-slam-gmapping
要查找可用的软件包,请运行:apt-cache search ros-kinetic