回调函数与spin()函数
回调函数在编程中是一种重要的方法,在维基百科上的解释是:
In computer programming, a callback is any executable code that is passed as an argument to other code, which is expected to call back (execute) the argument at a given time.
回调函数作为参数被传入到了另一个函数中(在本例中传递的是函数指针),在未来某个时刻(当有新的message到达),就会立即执行。Subscriber接收到消息,实际上是先把消息放到一个接受队列中去,如图所示。队列的长度在Subscriber构建的时候设置。当有spin函数执行,就会去处理消息队列中队首的消息。

spin具体处理的方法又可分为阻塞/非阻塞,单线程/多线程,在ROS函数接口层面我们有4种spin的方式:
| spin方法 | 是否阻塞 | 线程 |
|---|---|---|
| ros::spin() | 阻塞 | 单线程 |
| ros::spinOnce() | 非阻塞 | 单线程 |
| ros::MultiThreadedSpin() | 阻塞 | 多线程 |
| ros::AsyncMultiThreadedSpin() | 非阻塞 | 多线程 |
阻塞与非阻塞的区别我们已经讲了,下面来看看单线程与多线程的区别:
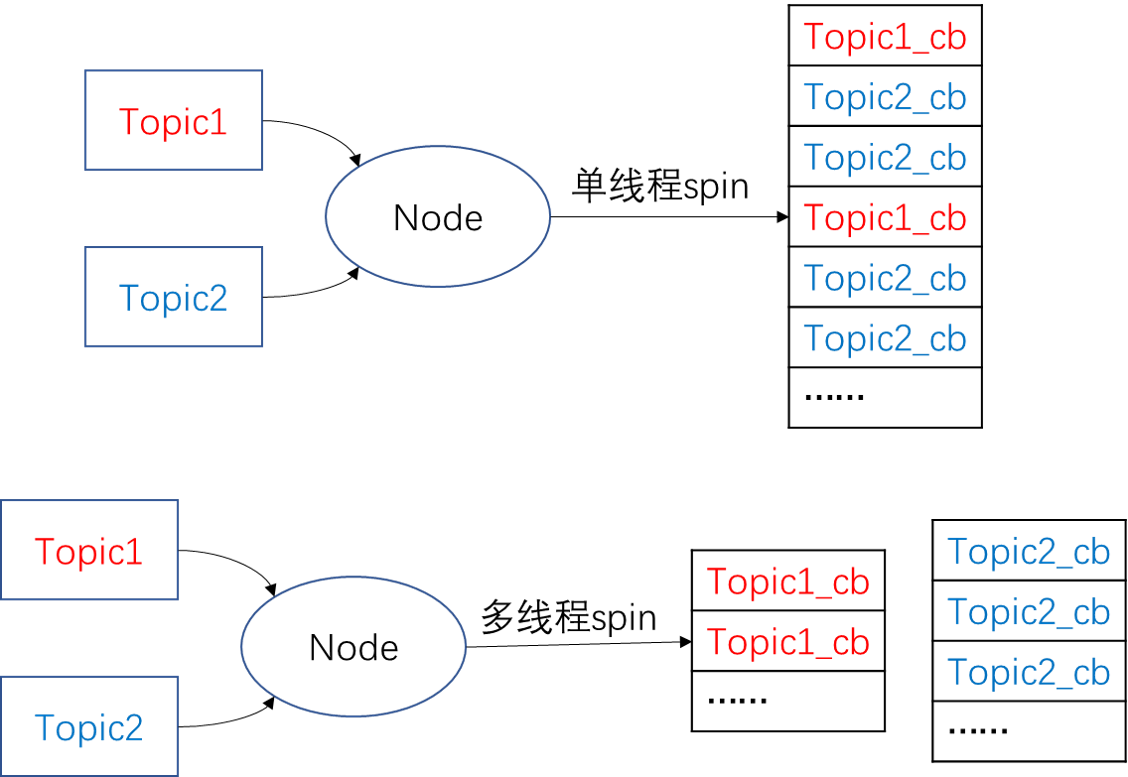
我们常用的spin()、spinOnce()是单个线程逐个处理回调队列里的数据。有些场合需要用到多线程分别处理,则可以用到MultiThreadedSpin()、AsyncMultiThreadedSpin()。